Hi all,
in short, I would like to be able to, semi-automatically, build a wall by ‘physically’ dropping the (generated) bricks into a box representing the outline of the wall. It’s almost working, but I can’t seem to get to ‘end’ the simulation (and keep the final transform).
Below is the relevant code; step [3] is the problem.
# [0] activate the target object
bpy.ops.object.select_all(action='DESELECT')
obj.select = True
context.scene.objects.active = obj
# [1] add a (default) rigidbody to it and bake its transform
bpy.ops.rigidbody.object_add()
bpy.ops.nla.bake(frame_start = context.scene.frame_start, frame_end = context.scene.frame_end, bake_types = {'OBJECT'})
# [2] go to last frame and apply the simulated transform (object has supposedly come to rest)
context.scene.frame_set(context.scene.frame_end)
bpy.ops.object.visual_transform_apply()
# [3] unlink/remove the action created (!!) on the objects transform in step [1: bake]
# !! this is the problem: neither of the below lines work -- wrong context
# bpy.ops.nla.action_unlink(force_delete = True)
# bpy.ops.action.unlink()
succes3 = False
# [4] turn off 'dynamic' (keep it where it is?) but keep collisions in place for future simulations
# -- this works, but should probably be commented out while debugging, eg until step [3] works
if succes3: obj.rigid_body.enabled = False
So the question really seems to be: how to unlink the (active) action/s from the active object/s, from within an Operator.execute()-context?
Here’s the current source/addon: dropRigidbodyTool.zip (3.83 KB)
Here’s a test blend (2.76) file (press generate button, near buttom of panel): dropRigiBody-010.blend (530 KB)
It looks like this:
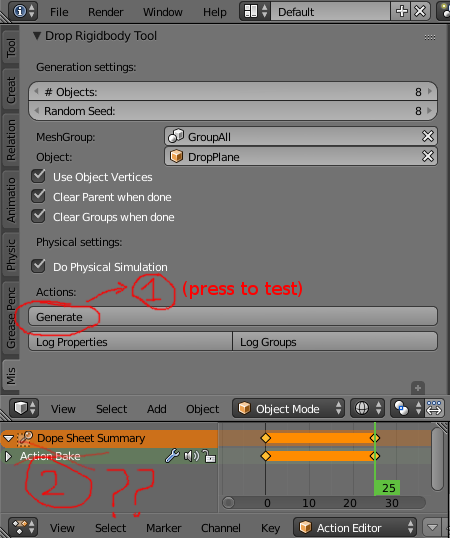
Any help very much appreciated!
