I’m continuing to work my way through the original Match, Track, Blend DVD, but I’ve smacked into a baffling problem in Chapter 16:
.
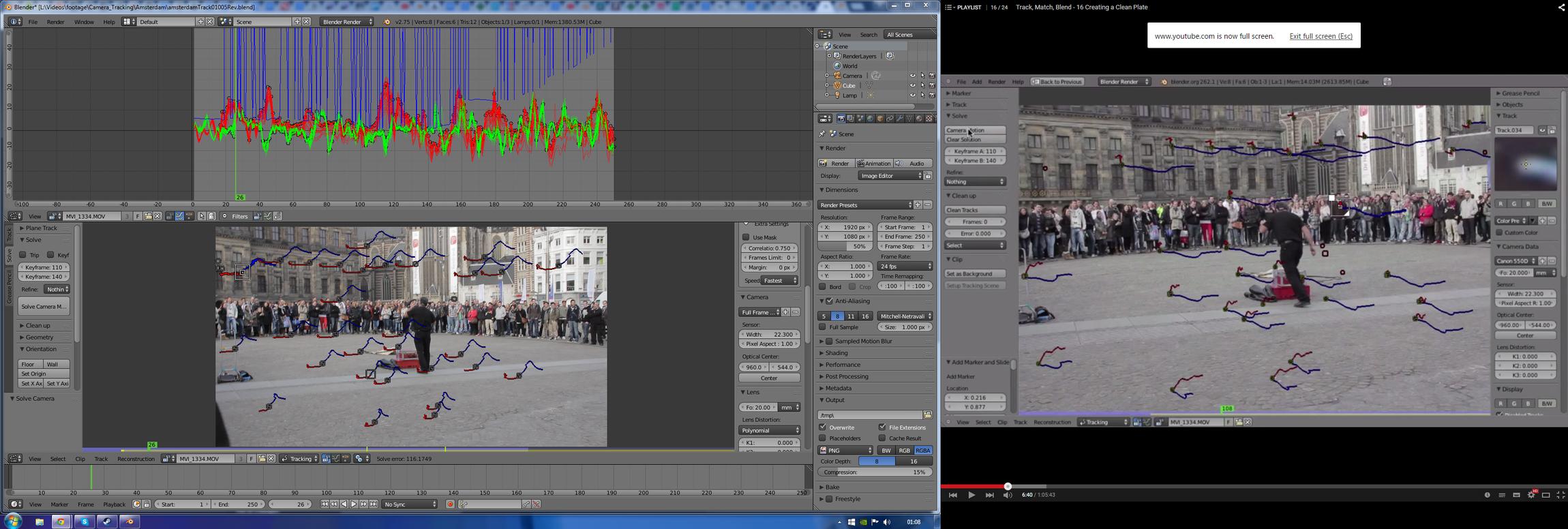
As you can see in the image above, I’ve tried to replicate as closely as I can the markers that Sebastian Koenig chooses for his tutorial (I’ve also tried to copy his camera settings).
However - my camera solution is often crazy, varying between 8 and 240. Not changing any variables and just clicking on Solve Camera Motion will usually return a new, often very high value.
Shortly after 6.40 in the video, Sebastian sets the solver to refine K1 & K2 and while I’ve tried the same, it only seems to restrict the average error within 16 units or so.
Obviously MTB was made for an earlier version of Blender - but could there be settings from an older version which are more effective than the current Tracker defaults? And if so - what are they!? I’ve certainly experimented with affine, etc.
Help and advice, very much appreciated. The DVD has been mostly fantastic, and I’ve learnt tons… just a shame to hit a brick wall on this useful lesson!
–Rev
PS: Bonus question! Obviously I haven’t finished the Clean Plate tutorial, but I took a look at this vid - https://www.youtube.com/watch?v=s_MXkTP73CI Is there a chance the plate cleaning / clone painting tech has made it into Blender yet?
Hey!
Could you send me your blendfile? I could have a look what’s going on then.
As for the cleanplate thing: So far there is only this script I wrote: https://github.com/sebastian-k/scripts/blob/master/cleanplate_creator.py

Sorry for delay, just saw your response!
.blend is here- is normally in a folder named Amsterdam alongside the file, MVI_1334.MOV.
Many thanks for taking a look at this! I hope it’s not a waste of your time - really excited to get unblocked here and finish the DVD! =D
Also - thanks for the script! Will get onto that once I’ve the current tutorial done…!
–Rev
Yeah, that was a bit of a weird problem. Lots of good markers, seemingly enough parallax (a moving camera) etc. So why did it fail?
As often, the main tool to get a good solution is the placement of the keyframes. Unfortunately the automatic keyframe detection doesn’t always do a good job on that. But here’s what I did:
Actually it did help me to open up the scene without the footage, because i could examine the movement of the markers. And what I found by scrubbing through the shot was that I could see the most parallax around frame 75 and 110. So setting keyframe A to 75 and keyframe B to 110 already gives you a solve error of 1.4, which is a nice starting point to bring it below one using Refinement for focal length and K1 and K2. So, if you have troubles solving a scene and are confident your markers are good, always try different keyframe settings. Set keyframes when you see the most parallax in your shots.
Fantastic! Success!
I clearly need to train my eyes to better detect parallax - though in fairness, this method was mentioned a couple of lessons earlier (the Turin footage, I think). I did get my values directly from the tutorial (no automatic keyframe detection used) but this is an excellent reinforcement on the parallax hunting advice!
With K1 & K2 I’m solved down to 0.6544 and the tutorial may continue! Many thanks, Sebastian, it’s a great DVD!
–Rev
PS: Actually, it’s perhaps worth noting that this still doesn’t explain why (almost! very! nearly!) identical actions across two different versions of Blender produced such strongly divergent results. Something to be aware of, maybe…