I open this to move a discussion here from another topic.
Plus it may be easier to search/find so others may benefit too.
I show here some simplified simulation for inertia and other small sim.
Using a pseudo simulation, that is a not full cloth or soft body, but a simpler setup for faster ways.
It is useful when you need simple sim on very complex objects, where a full sim would be slow and hard to setup.
<i>If u have other simple sim tricks like this, please post them.</i>
<i>I use a principle that I read long ago in other places, blender clan tank thread or so and before that.
soft body trick0 is a blend with the very basic setup, for a cube top to get some inertia
[ATTACH=CONFIG]383347[/ATTACH]
the setup:
-vertex groups for top/base, bone to deform the top, bone gets the location from a smaller sim
-the smaller sim is a 3 point line with vgroups for ends and middle.
It has a simple cloth sim, pin the ends, and middle will move with inertia.
-this way the verts with a certain vgroup will copy the move (by bone) from the smaller sim
soft body trick1 is a bit more than first, as it has a subdivided cube and a bbone for a more smooth effect
the setup is the same
(This is probably more like the example we have discussed elsewhere)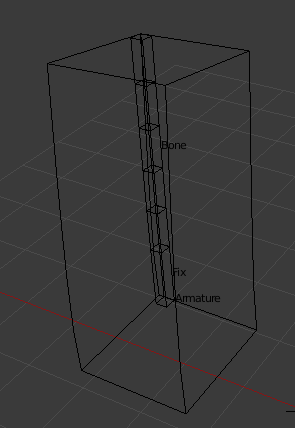
variations on the same priciple for a small car setup:
may ignore the rest of the wheel etc setup, I’m pointing here to the car body inertia (exaggerated to be obvious)
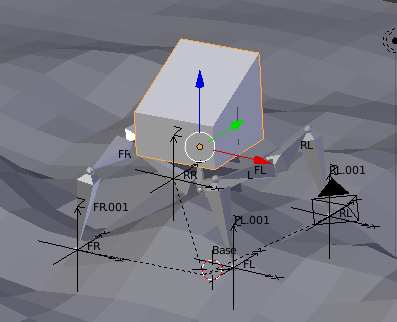
the car body is springing with some inertia using 2 small sims, for xy and for z
this allows extra control with the constraints for xy or for z
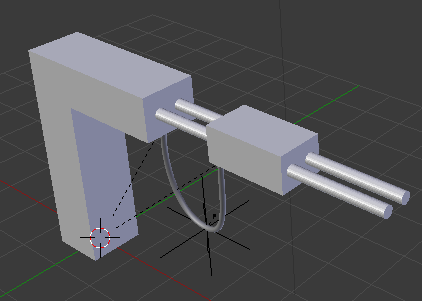
or for a small soft cable setup:
this is a setup for 1 single robotic object (rigid) parts moved by bones
the cables attached are just curves, with 2 bones, inertia copy from small sim
Please add other examples using this
and using similar small tricks.
o.g.