I am making my first rig and I would appreciate some help with it
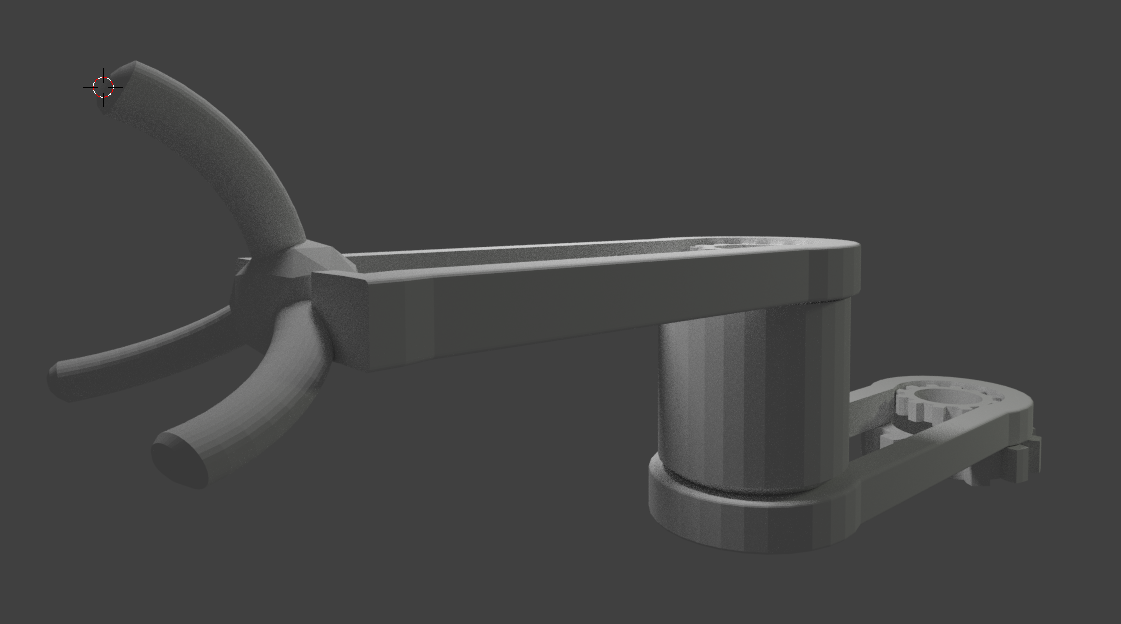
It is a simple robot arm, that will later be attached to some kind of robot (duh :))
Final result should be a robot that moves with this arm attached and animations showing ‘grab object’ and ‘drop object’ for this hand. So, all in all, pretty easy task
From available very good tutorials, I got some head start for this process. As example, this tutorial from revolt_randy member:
shows in some ways similar situation.
I understand that I probably won’t have to do weight painting, as good thing with mech. devices is that I will simply connect whole meshes (objects) of hand and fingers to specific bones and they will move without deformations.
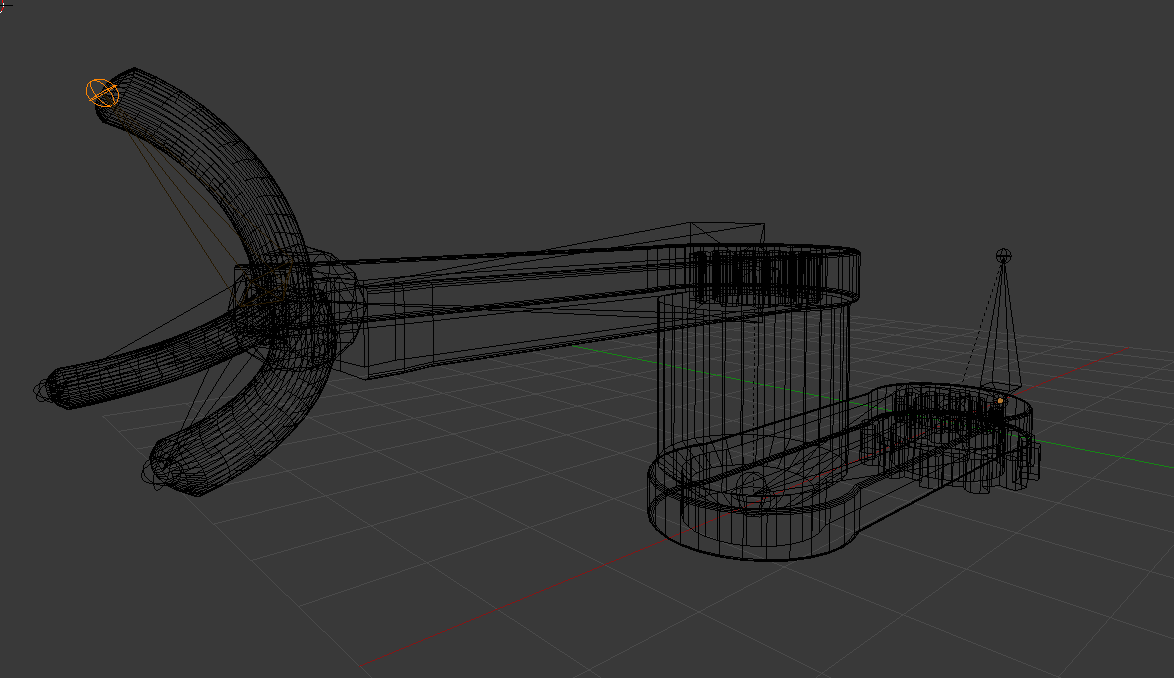
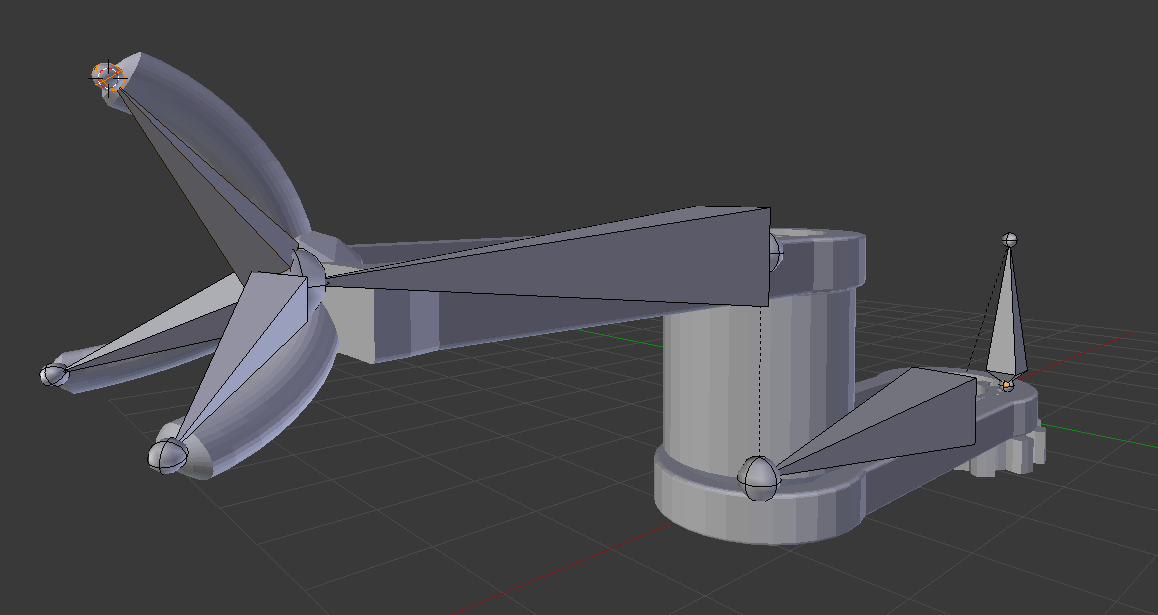
I created first armature and I would welcome some guidelines on is it good and in which way should I maybe progress:
Begginings and ends of the bones are at the exact centers of pivot points for two arm parts. Geometry is pretty clear, no doubles, applied scale/rotation.
Also, is there a point to use Rigify add on for this case? Like deleting almost all human armature and leaving just parts that are enough for this: three fingers and two bones for two arm parts?
Grateful in advance for any critic, help or comment :D,
minev
The rig setup has two offset horizontal arms connected by vertical hinge cylinder. The rig however is not chained from arm, hinge, to arm. It can work but do you have a reason for that setup? If you intend to control the arm chain with IK, the constraint will not work well across open gap in the bone chain.
My workflow is that the this hand will be attached to a robot that will be imported to Unity. It will move around and perform actions/animations that I will prepare in Blender. These actions are pretty simple, like grab object, drop object or scratch head etc. I already managed to create these actions with above rig, simply be keyframing rotations of bones in time. As I am not familiar with IK constraining (yet ), for now this is enough.
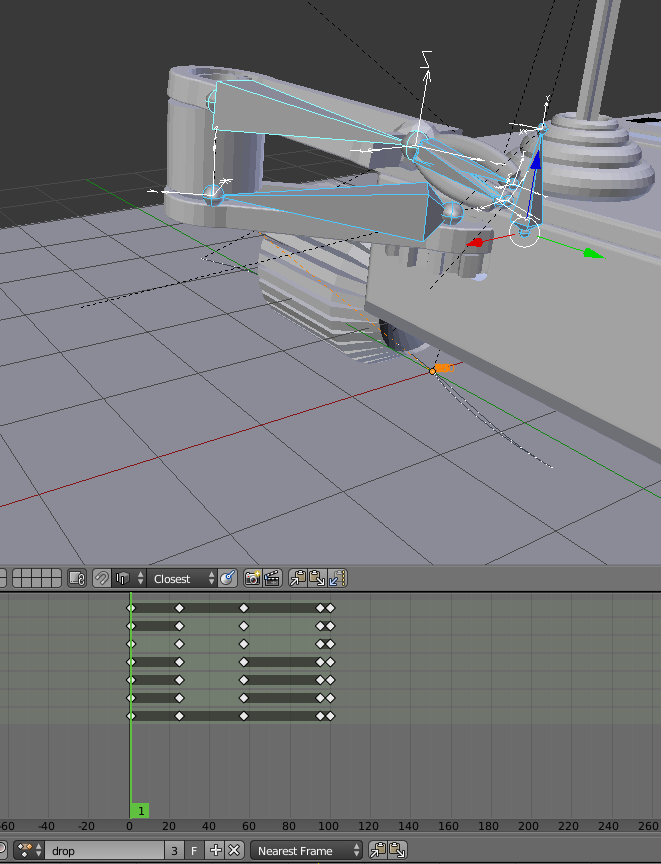
Here is a picture of end frame of grab animation, that is also a beginning of drop animation :D. Please, dont mind my quick render with 15 samples or something.
There is slight rotation misalignment of the second arm part visible. As the purpose will anyway be quite cartoon-like, I think I wont bother fixing it for now.
Now I need to prepare a wheels rig. Do you maybe know can I control Blender prepared rig in Unity (latest 4.5.5) ?
As movement will be controlled with keys in Unity, I can not make it as animation, but I will have to search for a way in Unity that pressed key rotates wheels/rig bones. Any good tutorial on subject would be greatly appreciated…